Beschreibung des Workshops (F2-T1-I)
Datenbasierte Modellierung und Regelung nichtlinearer dynamischer Systeme - Theorie und praktische Umsetzung
Termin:
Dauer:
Teilnehmerzahl:
Anwendungsfeld:
Inhaltliche Einsatzmöglichkeiten:
Einordnung Anforderungsniveau:
Kurzbeschreibung
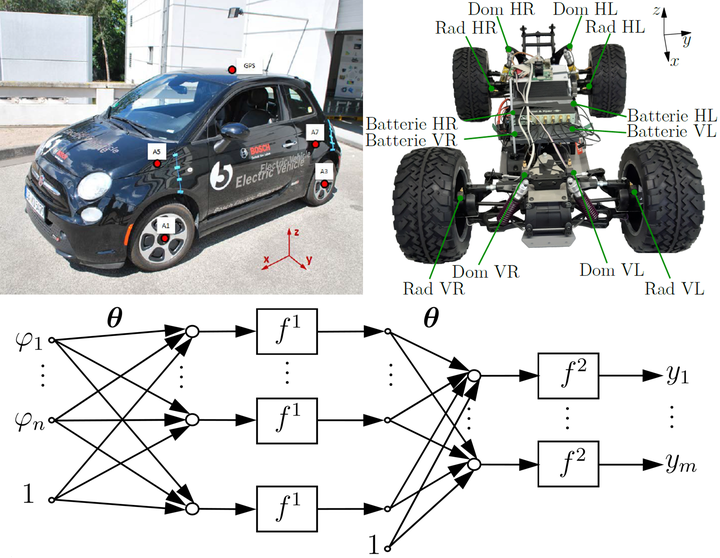
Innerhalb dieses Workshops behandeln wir die datenbasierte Modellierung nichtlinearer dynamischer Systeme mittels neuronaler Netze. Hierzu werden zunächst experimentelle Daten gesammelt. Die gesammelten Daten können dann zum Training und zur Validierung der neuronalen Netze verwendet werden. Ziel ist dabei, Methoden des Reinforcement Learning zur Regelung nichtlinearer dynamischer Systeme vorzustellen. Außerdem zeigen wir, wie diese Methoden simulativ und im Experiment umgesetzt werden.

Institut für Mechanik und Meerestechnik

Institut für Mechanik und Meerestechnik
Literatur zum Thema
Dostal L., Grossert H., Duecker D. A., Grube M., Kreuter D. C., Sandmann K., Zillmann B., Seifried, R., Predictability of Vibration Loads From Experimental Data by Means of Reduced Vehicle Models and Machine Learning. In IEEE Access, vol. 8, pp. 177180-177194, 2020.
Cyr C., Dostal L., Duecker D. A., Kreuzer E., Towards Reinforcement Learning-based Control of an Energy Harvesting Pendulum. In 8th European Control Conference (ECC), pp. 3934-3939, 2019.